
Tentacule origami
Groupe 4 : Thorpe, Matthew, Philippe, Margot, Wiam
INTRODUCTION
Curieux et intrigués par le mouvement des nageoires des poisson dans l’eau, nous nous sommes, par conséquent, lancés le défi de reproduire ce mécanisme musculaire (une nageoire ou une tentacule). Nous avons ainsi réalisé plusieurs processus d’imitation du mouvement musculaire avec un système de pompe à air pour reproduire la flexion (inspiration de l’air) et l’extension du muscle (expiration).



POURQUOI?
L’objectif est de reproduire un poisson pouvant se mouvoir dans l’eau grâce au système de nageoire mis en place en utilisant uniquement l’air comme source d’énergie.
COMMENT ?
- Dans un premier temps, nous avons simulé un muscle en insérant un ballon dans une gaine et en le scellant aux extrémités. On le branche ensuite à une seringue afin de le gonfler/ dégonfler ce qui crée des phénomènes de contraction / relaxation.

Contraction

Relaxation
Par ailleurs, nous avons testé en parallèle une différente approche qui revient à reproduire une tentacule grâce à un tube de silicone qui se plierait et se déplierait en utilisant le même principe de pompe à air. Avec cette méthode, on pourrait avoir plus de degrés de liberté en fixant plusieurs tubes ensemble. Pour se faire, nous avons essayé différents moules afin d’avoir un tube en silicone creux: stylo à billes, seringues avec une paille à l’intérieur …

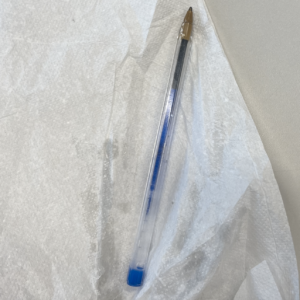
Tube creux de silicone avec un stylo à billes
Reference: https://www.youtube.com/watch?v=gPYjo-W2ctU
- Enfin, nous avons essayé de faire un muscle artificielle grâce à des origamis et une poche en plastique, en utilisant une pompe à air pour simuler les deux positions musculaires.
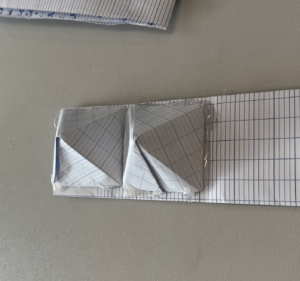
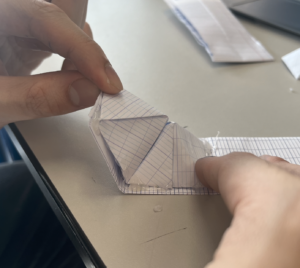
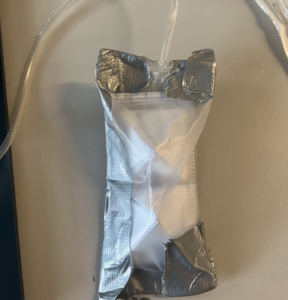
Deux pyramides à base carré collée à la suite, mises à l’intérieur d’une poche en plastique étanchéifiée avec du scotch et dans laquelle est insérée un tube
Deux pyramides à base carré collée à la suite, mises à l’intérieur d’une poche en plastique étanchéifiée avec du scotch et dans laquelle est insérée un tube
INSPIRATION:
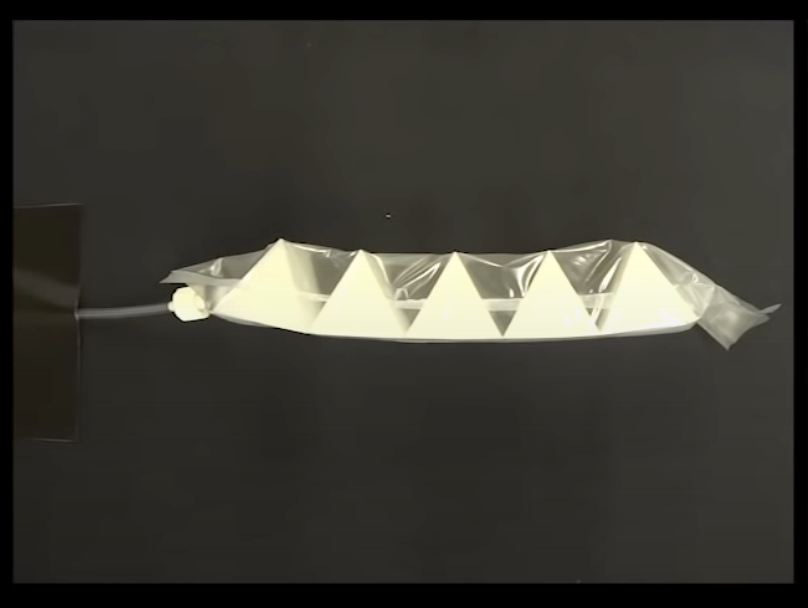
Reference: https://www.youtube.com/watch?v=Ir69MXyOvFs
DIFFICULTÉS
- Tube en silicone : le séchage prend trop de temps à cause du manque d’air à l’intérieur du stylo à billes qui est fermé des deux côtés. De plus, ce processus engendre plusieurs bulles d’air à l’intérieur du stylo, ce qui cause un manque d’uniformité à la surface du tube, ainsi que la présence de plusieurs trous.
- Origami : les pyramides en papier ne sont pas suffisamment rigides afin se plier sur elles même une fois à l’intérieur de la poche en plastique. En outre, le plastique utilisé est trop épais et rigide chose qui s’oppose au mouvement de contraction des origamis
RÉUSSITES
- Afin de remédier à la non rigidité des pyramides, nous avons utilisé du carton à la place du papier que nous avons collé sur une base en papier pour garder la souplesse du mouvement et assuré le repliement des pyramides sur elles-même. Par ailleurs, nous avons opté pour un gant au lieu du plastiquer mis à disposition. Ainsi, nous avons pu testé le mouvement musculaire recherché grâce à l’alignement de deux pyramides.
Test avec le gant
- Afin d’accentuer le mouvement musculaire de la tentacule, nous avons décidé de mettre trois pyramides à la suite. Toutefois, pour se faire, le gant n’était pas suffisamment long, c’est pourquoi nous avons opté pour du latex (des préservatifs) pour son élasticité et sa robustesse ainsi que sa forme cylindrique.


POINT DE BASCULE : GRIPPER
Après avoir réussi à reproduire le mouvement d’une tentacule grâce au pyramide en carton inséré à l’intérieur d’un contenant en latex, nous nous sommes rendu compte que celui-ci pourrait être mis à profit pour réaliser un système qui permet d’attraper des objets (Gripper). À partir de là, notre projet a pris une autre tournure: optimiser la force du grippe, sans oublier l’esthétisme.
premiers tests du système Gripper
En outre, afin de centraliser les entrées et sorties d’air, nous avons décidé d’imprimer, grâce à l’imprimante 3D, un joint avec une entrée et 3 ou 4 orifices de sorties. Toutefois, au final on a utilisé un joint mis à notre disposition et qui admet les mêmes fonctionnalités et caractéristiques recherchées.
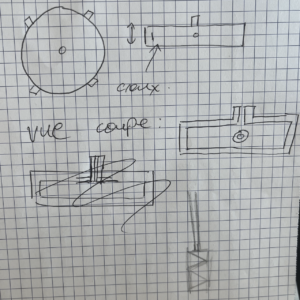
Croquis du joint à main levée
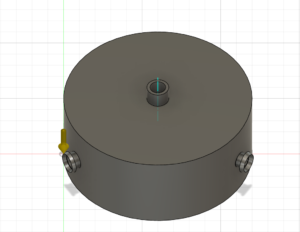
Représentation 3D
Ainsi, nous avons relié les trois tentacules à une seule plateforme. De plus, afin de s’adapter à la taille des différents objets et donc d’avoir une plus large gamme d’application, nous avons décidé de relier l’extérieur des tentacules à la plateforme grâce à un fil de pêche. Les trois fils ont était relié ensemble afin de pouvoir ouvrir et fermer le Gripper en tirant simplement sur le fil commun.
m = 62.5 g
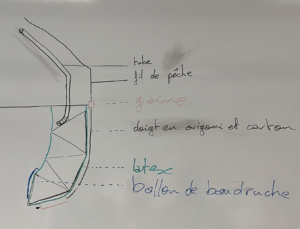
schéma de la tentacule

tentacule du Gripper
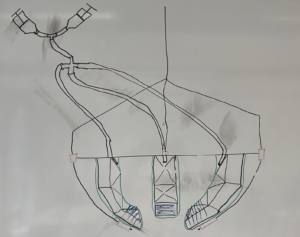
schéma général du système Gripper
PISTES D’AMÉLIORATION
Automatisation
- Moteur pour contrôler l’ouverture du Gripper via le fil de pêche.
- Pompe à vide pour actionner le Gripper automatiquement.
- Capteurs: détection de la largeur de l’objet à attraper et envoi de la commande au moteur responsable de l’ouverture du Gripper.
- Commande par Arduino du moteur, de la pompe à vide et des capteurs.
Optimisation
- Tester des matériaux différents pour la conception des tentacules: origami et enveloppe.
- Améliorer la robustesse du système: fixation des tentacules et des tubes.
Esthétisme
- Améliorer l’esthétisme du système de manière général.
REFERENCES
https://jfras.github.io/jfras/soft_projects.htm
https://jfras.github.io/jfras/papers/icra2018.pdf
https://www.youtube.com/watch?v=FUEUFckd1V0
POMPE KAOMER
Une solution qui a retenu notre attention pour le système de pompage à air automatisé, est la pompe KAOMER ( Pompe à vide à membrane KVP300 series), étant donné que plusieurs membres de forums disaient l’avoir utilisé pour faire le vide via un système de commande électronique.
Pour cela, une commande par Arduino est utilisé, associé à un capteur de pression qui renvoie en temps réel la pression dans le système ou l’on souhaite faire le vide.
On pourrait ainsi réaliser un système composé d’un capteur suivi d’un amplificateur de tension, et la pompe se déclencherait à partir d’une certaine valeur de tension ( utiliser un comparateur à seuil ).
Reference :
https://gmfcsoft.fr/blog/?p=2237
https://www.directindustry.fr/prod/kamoer-fluid-tech-shanghai-co-ltd/product-242598-2511979.html