
Gripper / Le grappin
Pourquoi ?
Il est très connu que l’idée de faire un prototype pour une prothèse de la main est très difficile et peu être cher (capteur, high tech etc.). On va donc présenter une idée plus simple et moins chère qui n’est qu’un prototype mais qui peu faire l’objet d’étude plus approfondie. On utilisera seulement un moteur à courant continu, joystick et la philosophie de la soft robotics.
Comment
Il y a un design 3d que l’on imprimera pour créer le corps principal et les doigts. On utilisera aussi un moteur à courant continu et une carte Arduino pour les contrôler. Du silicone est utilisé pour faire les articulations des phalanges.
Différents test effectués:
-Utilisation du moteur à courant continu.
-Utilisation du joystick
-Utilisation du circuit électronique pont en H pour inverser le sens de rotation
-Combination du moteur et du capteur pour effectuer le comportement voulu
-Création du silicone et des membres de la main (aidé par un projet existant)
Difficultés
-Apprendre le langage qu’utilise Arduino
-Adaptation et amélioration d’un projet existant
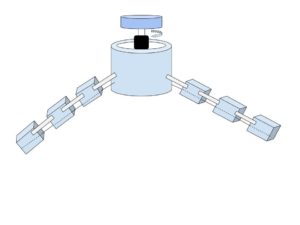
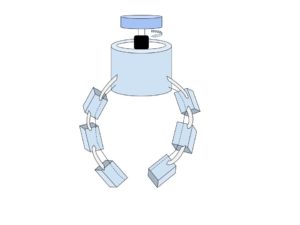
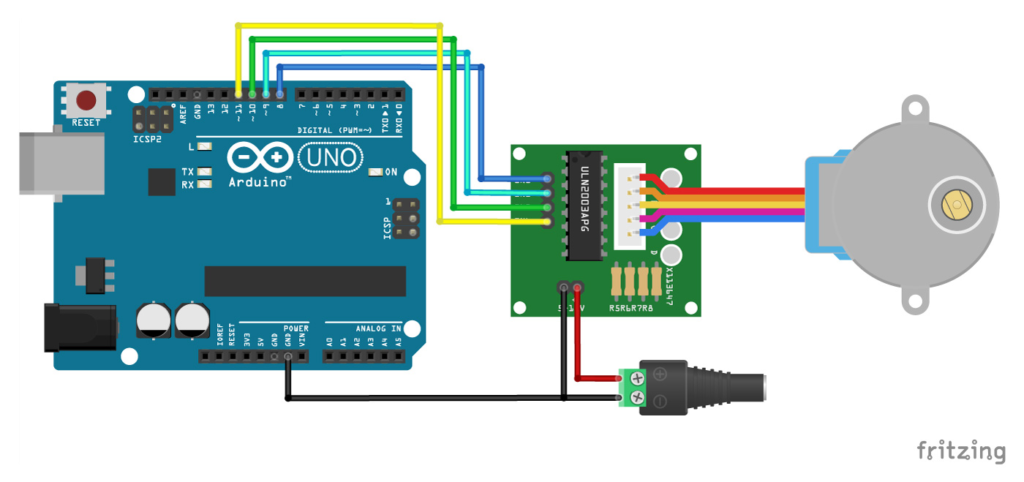
Schéma du principe
Étapes de construction
Partie mécanique
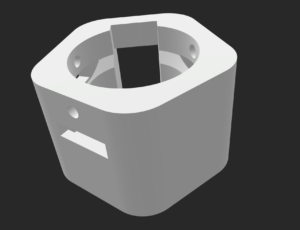
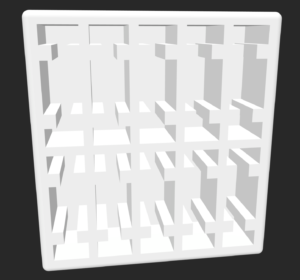
1ère étape: impression des pièces nécessaires en 3D

 /
/
Fichiers .stl pour l’impression en 3D:
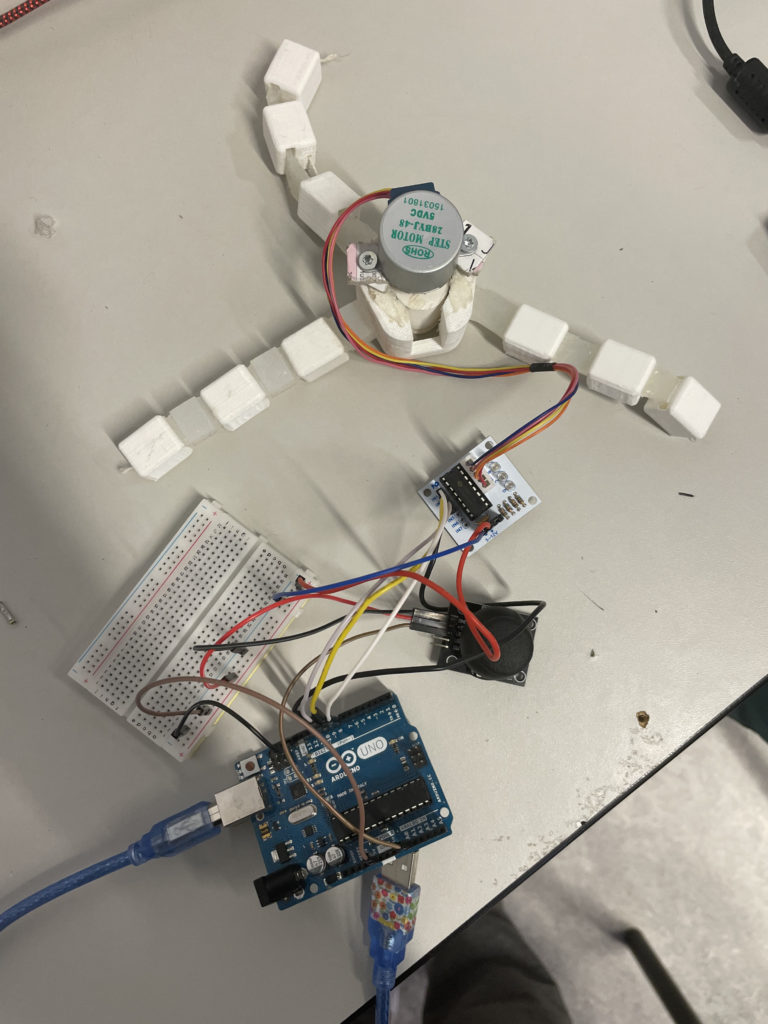
2ème étape: assemblage des doigts (silicones + pièces solides) et assemblage du moteur.


Partie Electrique
1ère étape: Pilotage du moteur pas à pas et câblage
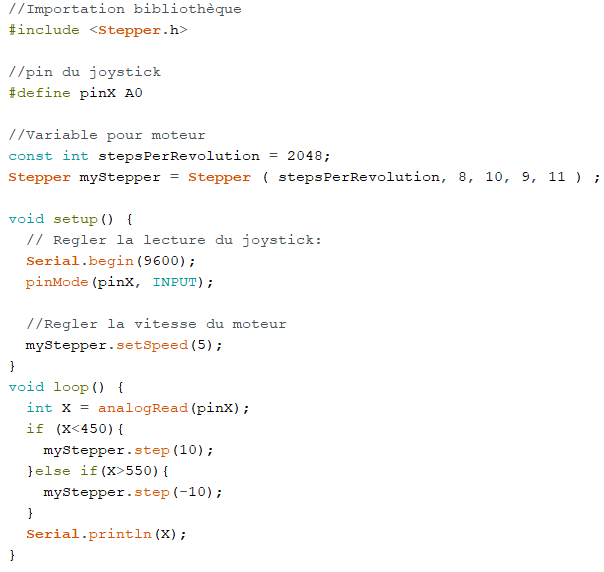
2ème étape: Amélioration du pilotage avec un joystick et programmation finale !
3ème étape: Test non concluant avec un moteur à courant continu

Résultat final !
Réussites
– réalisation du robot.
– la main se sert et soulève un câble et un gobelet une fois sur 7

Apprentissages
– conception d’un robot à partir d’un schéma construit
– réalisation de pièces en Silicone
– impression en 3D
Perspectives
– améliorer la force du gripper en utilisant des fils en nylon
– améliorer l’adhérence de bouts des doigts en ajoutant du silicone.
– augmenter la vitesse du serrage en augmentant la tension d’alimentationdu moteur
– réalisation d’un support automatique qui permettra le déplacement des pièces sans l’intervention de l’être humain.