Grenouille sautante
1. Introduction
 Nous avons souhaité faire une grenouille sautante pour ce projet de Soft Robotique. L’idée de la grenouille était avant tout une décoration mais le but principal était de concevoir un système pouvant faire des sauts avec des objets et matériaux à notre disposition.
Nous avons souhaité faire une grenouille sautante pour ce projet de Soft Robotique. L’idée de la grenouille était avant tout une décoration mais le but principal était de concevoir un système pouvant faire des sauts avec des objets et matériaux à notre disposition.
2. Système de saut
 Le système de saut s’applique aux deux pattes arrières de la grenouille. Nous avions à notre disposition des ressorts et des élastiques pour le concevoir. La principale difficulté de cette première étape de conception était la créativité, aussi bien au niveau scientifique (théorie) qu’au niveau technique (application de cette théorie et méthode). L’élément le plus important à prendre en compte était de réfléchir à un système qui pouvait être constitué de deux états (compressé et relâché). Nous avons alors choisi d’utiliser deux ressorts fixés perpendiculairement sur un croisillon en bois (voir schéma), l’un à mémoire de forme qui peut se compresser lorsqu’il est soumis à un courant de l’ordre de quelques Ampères (afin de stocker l’énergie à libérer pour le saut) et l’autre, classique permettant le relâchement. Ce premier résultat a été concluant puisque nous avons réussi à faire des sauts manuellement d’une hauteur d’environ 1 voire 2 mètres avec ce système.
Le système de saut s’applique aux deux pattes arrières de la grenouille. Nous avions à notre disposition des ressorts et des élastiques pour le concevoir. La principale difficulté de cette première étape de conception était la créativité, aussi bien au niveau scientifique (théorie) qu’au niveau technique (application de cette théorie et méthode). L’élément le plus important à prendre en compte était de réfléchir à un système qui pouvait être constitué de deux états (compressé et relâché). Nous avons alors choisi d’utiliser deux ressorts fixés perpendiculairement sur un croisillon en bois (voir schéma), l’un à mémoire de forme qui peut se compresser lorsqu’il est soumis à un courant de l’ordre de quelques Ampères (afin de stocker l’énergie à libérer pour le saut) et l’autre, classique permettant le relâchement. Ce premier résultat a été concluant puisque nous avons réussi à faire des sauts manuellement d’une hauteur d’environ 1 voire 2 mètres avec ce système.
3. Stabilisation du système
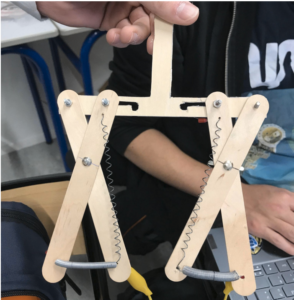 La problématique qui s’est ensuite dressée face à nous était de trouver un moyen de contrôler le saut et de fixer ce système au corps de la grenouille. Nous avons eu l’idée de fixer le bout de l’une des deux lames du croisillon à la planche et de pouvoir faire coulisser l’autre bout dans une piste. Il fallait que, après la compression du ressort vertical à mémoire de forme (donc élongation de l’autre ressort horizontal), le bout de la lame coulissante devait se bloquer dans un cran afin de libérer ensuite d’un seul coup toute l’énergie stockée et ce, de manière simultanée entre la patte gauche et droite.
La problématique qui s’est ensuite dressée face à nous était de trouver un moyen de contrôler le saut et de fixer ce système au corps de la grenouille. Nous avons eu l’idée de fixer le bout de l’une des deux lames du croisillon à la planche et de pouvoir faire coulisser l’autre bout dans une piste. Il fallait que, après la compression du ressort vertical à mémoire de forme (donc élongation de l’autre ressort horizontal), le bout de la lame coulissante devait se bloquer dans un cran afin de libérer ensuite d’un seul coup toute l’énergie stockée et ce, de manière simultanée entre la patte gauche et droite.
 Suite à plusieurs expérimentations, nous nous sommes aperçus qu’il était mieux de remplacer le ressort classique par un deuxième ressort à mémoire de forme car le relâchement était plus puissant et résistait moins avec ce type de ressort. 1/2 Pour libérer les deux lames bloquées dans les crans d’un seul coup, nous avons décidé d’utiliser un système de « râteau » constitué d’un ressort à mémoire de forme avec une barre en bois perpendiculaire pour que, lorsqu’il est alimenté par un courant, il puisse se compresser, fasse remonter avec lui la barre qui permet le déblocage de la visse et fasse ainsi revenir la lame dans sa position initiale en coulissant sur la piste.
Suite à plusieurs expérimentations, nous nous sommes aperçus qu’il était mieux de remplacer le ressort classique par un deuxième ressort à mémoire de forme car le relâchement était plus puissant et résistait moins avec ce type de ressort. 1/2 Pour libérer les deux lames bloquées dans les crans d’un seul coup, nous avons décidé d’utiliser un système de « râteau » constitué d’un ressort à mémoire de forme avec une barre en bois perpendiculaire pour que, lorsqu’il est alimenté par un courant, il puisse se compresser, fasse remonter avec lui la barre qui permet le déblocage de la visse et fasse ainsi revenir la lame dans sa position initiale en coulissant sur la piste.
4. Automatisation
 Nous avons ensuite pensé à automatiser la grenouille en utilisant Arduino. Nous voulions ainsi programmer l’envois des courants dans les ressorts à mémoire de forme en respectant les délais. En effet, d’abord, nous devons envoyer le courant dans le ressort horizontal permettant la compression (étape 1 sur le schéma ci-contre) ; ensuite, dans le ressort du râteau permettant sa remontée pour débloquer la vis (étape 3 sur le schéma) ; enfin, dans le ressort horizontal pour faire revenir à l’état initial (étape 6 sur le schéma).
Nous avons ensuite pensé à automatiser la grenouille en utilisant Arduino. Nous voulions ainsi programmer l’envois des courants dans les ressorts à mémoire de forme en respectant les délais. En effet, d’abord, nous devons envoyer le courant dans le ressort horizontal permettant la compression (étape 1 sur le schéma ci-contre) ; ensuite, dans le ressort du râteau permettant sa remontée pour débloquer la vis (étape 3 sur le schéma) ; enfin, dans le ressort horizontal pour faire revenir à l’état initial (étape 6 sur le schéma).
5. Optimisation
 Le système semble fonctionner mais il reste toutefois des imperfections. Pour y remédier, nous avons voulu optimiser certains aspects comme le coulissage de la lame. Pour ce faire, nous avons décidé de retourner le croisillon afin de mettre le ressort vertical du côté intérieur (donc côté du cran de stockage) pour que le déblocage soit plus accentué.
Le système semble fonctionner mais il reste toutefois des imperfections. Pour y remédier, nous avons voulu optimiser certains aspects comme le coulissage de la lame. Pour ce faire, nous avons décidé de retourner le croisillon afin de mettre le ressort vertical du côté intérieur (donc côté du cran de stockage) pour que le déblocage soit plus accentué.
6. Conclusion et problématiques
Les différentes étapes restent dans la pratique assez lentes (compression, déblocage, coulissage, etc) et le système a quelques contraintes (par exemple, le bois n’adhère pas beaucoup au sol), ce qui fait que le saut n’est pas vraiment un saut (1 petit cm environ).
Regarder à partir de 0:19
Pourquoi ?
Nous avons souhaité faire une grenouille sautante pour ce projet de Soft Robotique. L’idée de la grenouille était avant tout une décoration mais le but principal était bel et bien de concevoir un système pouvant faire un saut avec des objets et matériaux à notre disposition.
Comment ?
Pour ce faire, nous avons opté pour l’usage des ressorts, un choix qui nous paraissait logique au premier abord. Or, notre souhait était que la grenouille puisse faire plusieurs sauts consécutifs. Il fallait pour cela que le système puisse revenir à son état initial (état compressé), après avoir sauté (état relâché). La solution pour que le système puisse revenir à son état initial a été alors d’utiliser le ressort à mémoire de forme qui peut se compresser lorsqu’il est soumis à un courant (de l’ordre de quelques Ampères).
Avec ce jeu de deux ressorts fixés à des croisillons (pattes), l’un permettant l’impulsion (relâchement de l’énergie) et l’autre permettant la compression, cela permettait de simuler au mieux un saut naturel. Afin de nous assurer que la grenouille saute droit, nous avons fixé ces deux pattes au corps (planche de bois). Celui-ci est constitué d’une piste, permettant le coulissage d’une lame, au bout de laquelle se trouve un cran qui permet de stocker l’énergie de rappel du ressort lors du chauffage du ressort à mémoire de forme.

Difficultés
La première difficulté a été de trouver les idées et d’être créatif. En effet, nous ne savions pas forcément le potentiel des objets et matériaux qui étaient à notre disposition. Il a également été compliqué de trouver des moyens techniques et des systèmes fiables permettant le saut et de trouver une réponse matérielle (rigidité, souplesse, flexibilité…).
Réussites
En revanche, malgré ces difficultés, nous avons souvent eu de bonnes idées, mêlant théorie scientifique et design. Ce qui a aussi été intéressant est notre capacité à faire preuve d’ingéniosité en utilisant seulement les objets à notre disposition, tout en veillant à être rigoureux.

Découvertes
Durant ce projet, nous avons découvert de nouveaux matériaux et matériels comme le ressort à mémoire de forme, un objet très intéressant pour notre système de saut, ou encore de nouvelles techniques comme le moulage en silicone.

Par ailleurs, contrairement à des projets très guidés que nous avions pu mener auparavant dans d’autres UE, nous n’avions pas spécialement de directives. Nous devions être créatifs, aussi bien dans l’aspect scientifique (théorie) que dans l’aspect technique (application de la théorie et méthode).
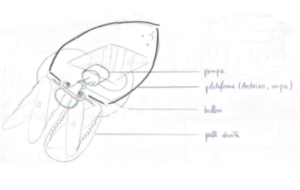
Perspectives
Au début, nous avions pour idée d’automatiser tout ce système afin que la grenouille fasse plusieurs sauts d’affilée. Comme décrit sur le schéma ci-dessous, nous avons voulu nous servir d’un ballon de baudruche qu’on gonflerait avec une pompe guidée par un système de programmation Arduino. L’objectif était que, une fois la patte rétractée (c’est-à-dire lorsque l’une des lame d’un croisillon serait bloquée dans le cran d’arrêt de la piste), le fait de gonfler le ballon permettrait de pousser la visse maintenant cette lame ancrée dans le cran pour qu’elle relâche toute son énergie stockée.