
 PneuNets Bending Actuators
PneuNets Bending ActuatorsLes PneuNets (réseaux pneumatiques) sont une catégorie d’actionneurs souples développés à l’origine par le groupe de recherche Whitesides à Harvard. Ils sont constitués d’une série de canaux et de chambres à l’intérieur d’un élastomère. Ces canaux se gonflent sous l’effet de la pression, créant ainsi un mouvement.
Mold for Soft actuator/gripper – Parametric – OpenSCAD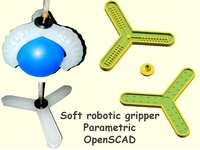
Ce projet présente une pince robotique souple à trois doigts. Le préhenseur est un actionneur pneumatique construit à partir de caoutchouc silicone EcoFlex 00-30 et d’un moule en silicone imprimé en 3D. Le moule est conçu comme un modèle paramétrique OpenSCAD afin que l’on puisse expérimenter différents paramètres de conception tels que l’épaisseur de la pince, le nombre de doigts, le nombre et la taille des canaux d’air, etc.
 Customizable Bending Actuator
Customizable Bending ActuatorIl s’agit d’une version personnalisable du minuscule actionneur robotique souple. Lorsqu’il est gonflé, l’actionneur se plie. Vous pouvez modifier sa longueur et sa largeur. Les instructions sont les mêmes que pour l’original.
Il s’agit d’une version modulable d’un moule pour grappin
https://www.youtube.com/watch?v=ZPE04FM9RRE