
Le détecteur d’obstacles
Pourquoi ?
Selon l’Organisation Mondiale de la Santé, 314 millions de personnes sont atteintes de déficience visuelle dans le monde, 15% d’entre elles sont aveugles. C’est un handicap complexe, multiple et dont les chances du traitement sont rares.
Ce constat a donné lieu au lancement d’un programme baptisé « vision 2020 » : The Right To Sight qui regroupe plusieurs associations professionnelles qui visent à développer les infrastructures et les technologies pour réduire ces troubles. Ces trois dernières décennies ont vu apparaitre un certain nombre de dispositifs d’assistance utilisant de nouvelles technologies telles que les ultrasons, le laser, l’infrarouge et le GPS.
Les aides à la mobilité les plus utilisés par les aveugles sont les cannes et les chiens guides pour faciliter leurs déplacements. Mais il y’a un problème pour cette navigation, ces systèmes répondent en partie aux difficultés des non-voyants. Ces aides sont particulièrement bien acceptées mais elles ne répondent qu’aux seules difficultés liées au déplacement. Les progrès dans le domaine des sciences et technologies de l’information et de la communication ont permis de concevoir alors de nouvelles aides électroniques afin de pallier les difficultés auxquelles le chien et la canne ne répondent pas.
Une des fonctions principales du système visuel humain est de localiser des objets. Cette faculté est essentielle pour se déplacer, s’orienter en se représentant l’espace mais aussi pour atteindre et saisir des objets. Pour cela, nous sommes dans notre travail intéressées à une amélioration d’un gant intelligent pour les personnes ayant un trouble de la vision qui permet une détection des obstacles.
Afin d’aider les malvoyants à éviter de rencontrer des obstacles, ce gant serait sensible à la proximité des objets grâce à un capteur ultrasonore, sur le principe d’un sonar, comme les chauves-souris.
Comment ?
Ce gant est équipé d’un capteur ultrasonore, qui, à l’aide de l’effet Doppler reçoit le signal émis, réfléchi sur l’objet, et peut alors savoir sa distance à l’objet.
Lorsque la distance avec l’objet obstacle est inférieure à un certain seuil (considéré comme seuil de danger : distance à partir de laquelle l’individu va se mettre en danger vis-à-vis de l’obstacle), le gant va émettre un signal sonore à l’aide d’un buzzer, d’un vibreur ou d’un bracelet à mémoire de forme qui se contracte et effectue une pression sur le poignet (ou une bague sur le doigt), afin de convenir aux personnes malvoyantes et malentendantes.

Difficultés et réussites
Toute la première partie s’est bien déroulée, nous avons réussi à réaliser le détecteur d’obstacle émettant un son à l’aide du buzzer : plus on se rapproche du capteur ultrasonore, plus les bips sonores du buzzer sont rapprochés.

Buzzers sonores testés
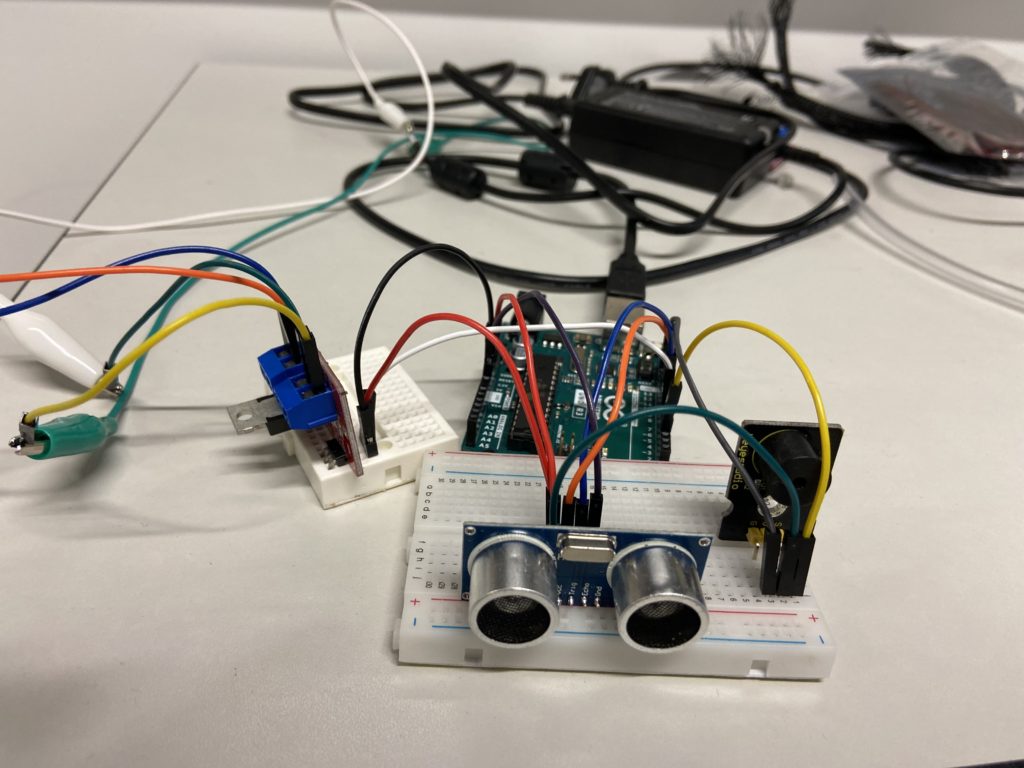
Prototype n°1 : capteur ultrason + buzzer sonore + amplificateur Nos + alimentation 5V
Bracelet : ressort + gaine
Lors de l’essai du bracelet à mémoire de forme, le ressort à mémoire de forme chauffe lorsqu’on l’alimente, ce qui peut être dangereux. Il faut donc protéger l’utilisateur de cette chaleur.
Pour cela nous pensions protéger le ressort à l’aide d’une gaine en maille rétractable, qui résiste assez bien à la chaleur.
Nous avons réussi à réaliser un bracelet qui se ressert lors de la détection d’un obstacle.
Cependant, ce système ne protège pas assez de la chaleur, malgré son bon fonctionnement.

De plus il ne se détends pas une fois qu’il n’est plus sous tension ce qui pose problème.
Bracelet 2
Utiliser un ressort pour contraindre le ressort à mémoire de forme afin qu’il revienne à sa position initiale

⚠️ Sert énormément le doigt et pas agréable pour le porteur
Bague en silicone
Notre troisième idée serait de protéger ce bracelet avec du silicone plutôt que la gaine, afin de mieux protéger de la chaleur.
Pour cela nous avons créé une bague sur le même principe, dans un ensemble en silicone moulé par nos soins.
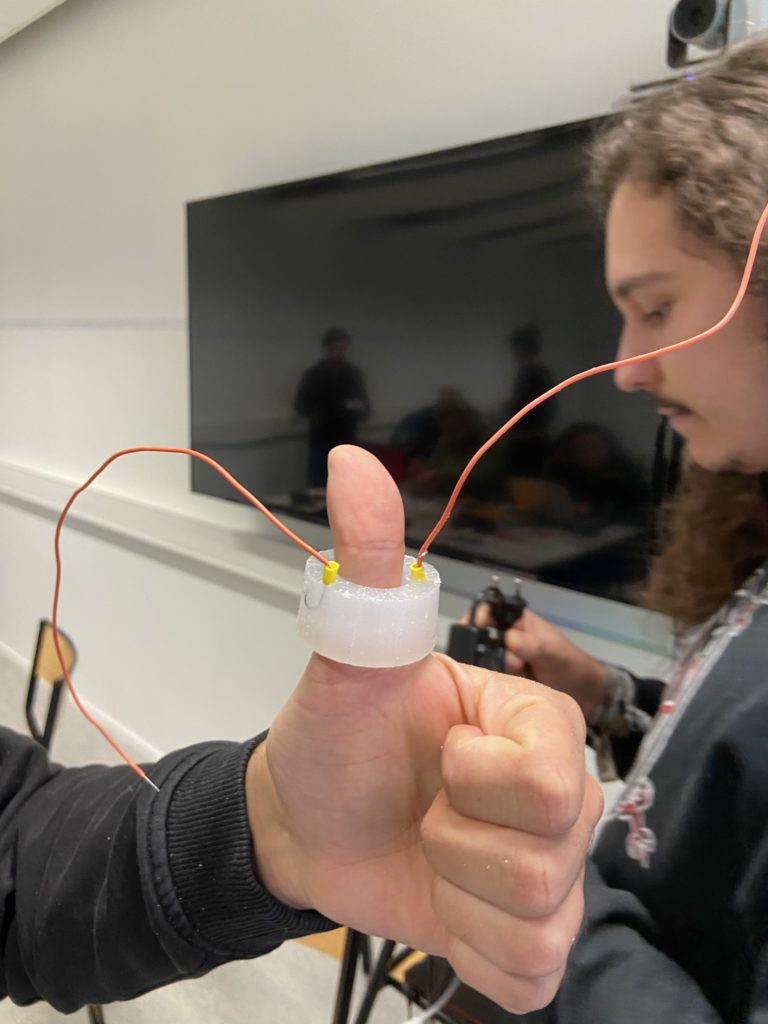
Bague en silicone rétractable
Vibration
Notre dernière idée est de réaliser une vibration sur la main de l’utilisateur lors de la détection.
Pour cela nous avons utilisé un capteur piézoélectrique, qui, lors de la détection d’un objet trop proche (à distance inférieure du seuil accepté), va émettre une vibration sur la main de l’utilisateur.
Cependant ces vibrations ne sont pas bien fortes.
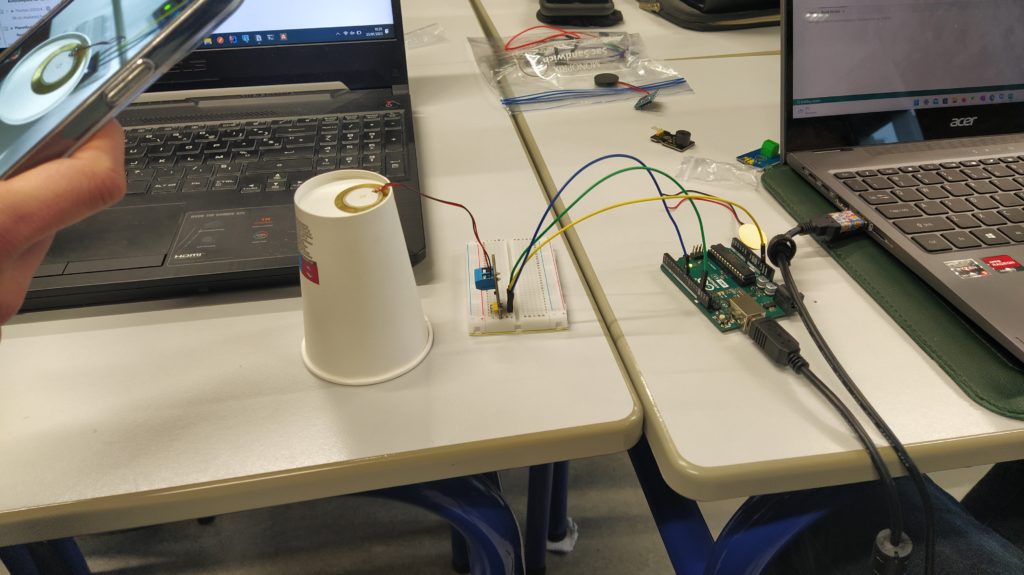
Nous avons donc amplifié ces vibrations à l’aide d’un petit module ajouté à notre circuit électrique.
Ainsi le capteur piézoélectrique émet des vibrations assez fortes, ce qui, en le collant à la tempe, permet d’avoir de très fortes vibrations, et même un son créé dans la tête. Ceci peut alors permettre de prévenir l’individu de l’obstacle.
De plus, la fréquence de ces vibrations augmente lorsque l’obstacle se rapproche.

Ainsi nous allons étendre les cables du piézo, afin que celui-ci puisse atteindre la tempe de l’individu, le reste du système étant sur sa main
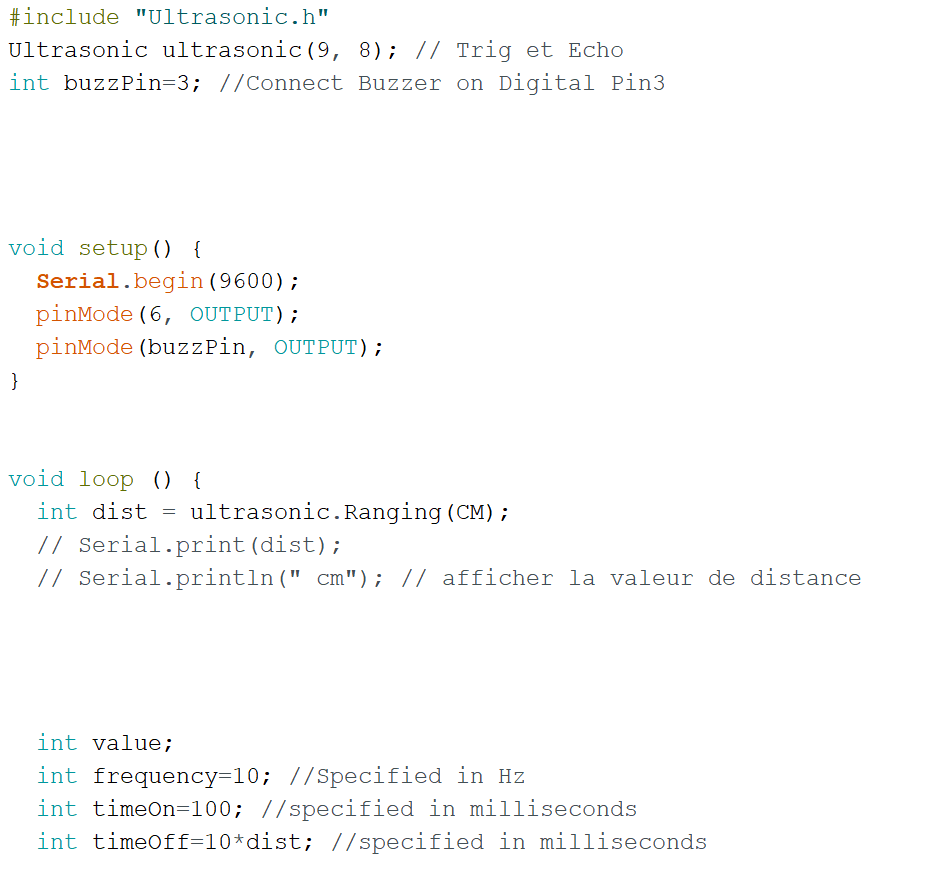
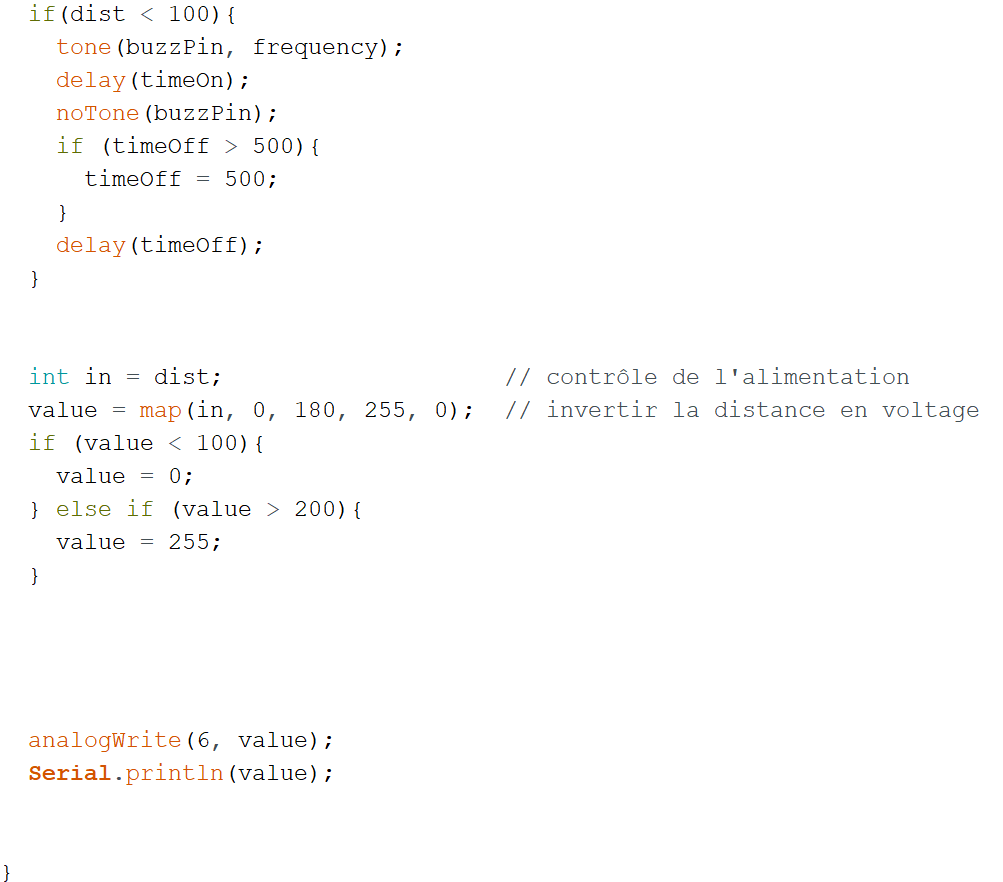
Notre code Arduino se présente de la manière suivante :
Nous avons par la suite miniaturisé le système électrique à l’aide d’une carte Arduino Nano.
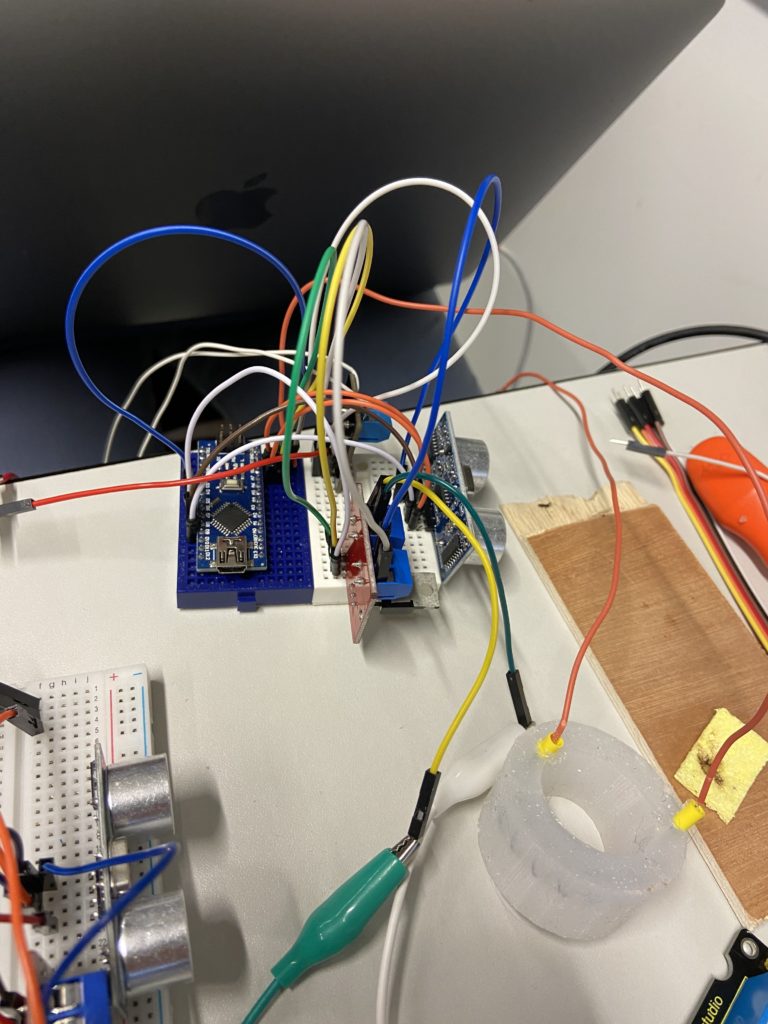
Ce système devrait en théorie tenir sur un gant.
La bague en silicone placée sur le doigt est fonctionnelle en même temps que le vibreur piézoélectrique, branché sur la tempe de l’individu.
Ainsi l’individu est prévenu de 2 manières indépendantes. L’une peut fonctionner sans l’autre.
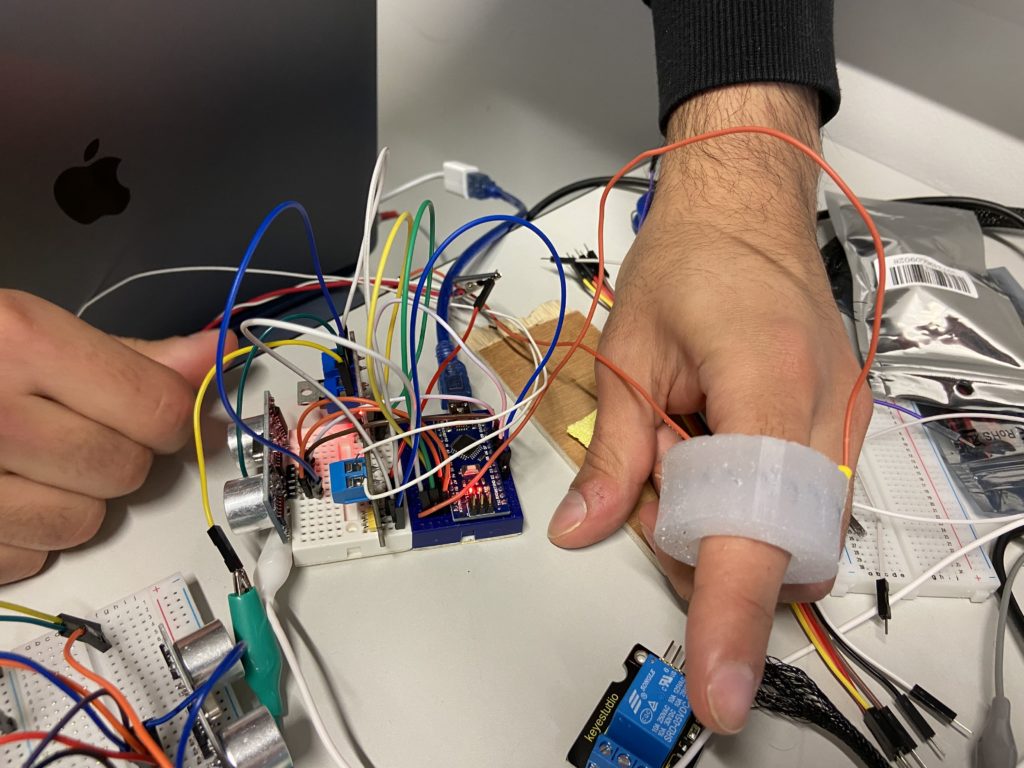
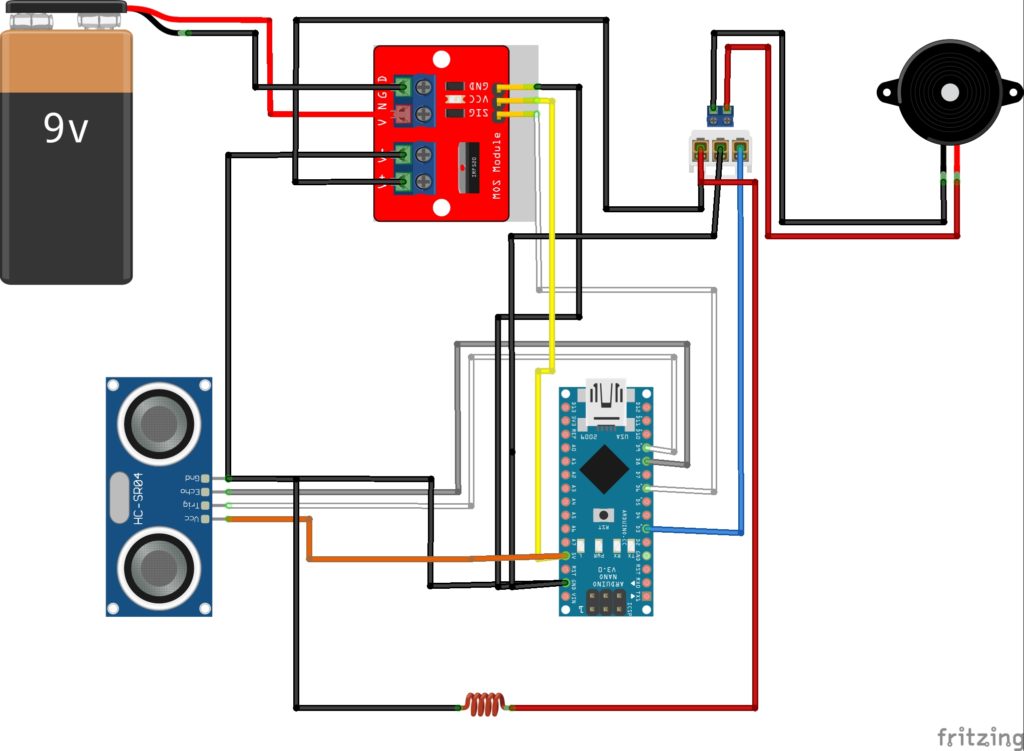
Schéma électrique final
Apprentissages
On commençait à 9h et pas 9h30.
Le ressort à mémoire de forme chauffe bien trop fort…
Le silicone est très dur à manipuler comme on le souhaite, mais revient très vite à sa forme initiale lorsqu’on le déforme, ce qui est pratique.
Le piézoélectrique n’émet pas de très fortes vibrations, ce qui est un peu dommage.
Perspectives
Il faudrait maintenant alimenter le système par une batterie, pour que le gant soit portable, et l’aménager de manière ergonomique.
De plus nous pensons alimenter l’Arduino Uno avec une pile 9V pour le transport, si nous gardons cette carte, et non le système compact (Arduino Nano).
